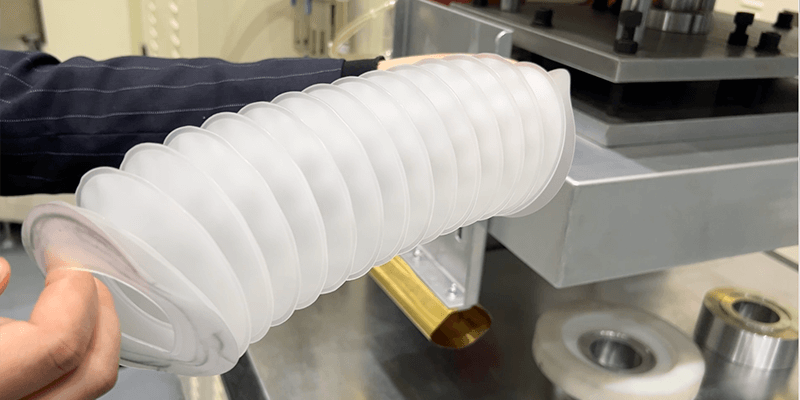
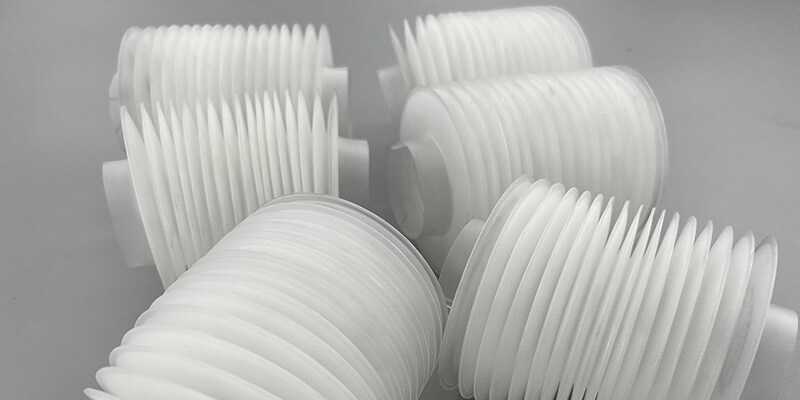
柔性风琴式防护罩高频热合设备
焊接机器人采用先进的计算机控制、传感器和人工智能技术,根据预设程序自动完成焊接任务,实现对焊缝的准确控制。
操作人员可设置关键点和焊接参数,工业焊接机器人可记忆操作并生成程序。

其工作原理基于用户导引机器人,通过六个轴完成复杂的三维运动。一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数、焊接参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个起动命令,机器人将精确地按示教动作,一步步完成全部操作。
完整的系统包括操作手、变位机、控制器等,实现高效精准的焊接操作。此外,焊接机器人的动作可以细分为六个轴,分别是前后轴、上下轴、左右轴和旋转轴。通过这些轴的协作,可以使机器人完成复杂的三维运动。
控制系统将运动轨迹等信息传输给机器人,机器人根据这些信息进行相应的动作,将焊接设备移动到被焊接材料的位置,完成焊接任务。
弧焊机器人可以在所有电弧焊、切割技术及类似的工业方法中应用。一套完整的弧焊机器人系统,应包括机器人机械手、焊接装置、控制系统、焊件夹持装置。焊接机器人是按照示教程序规定的动作、顺序和参数进行电焊作业,其过程是完全自动化的,具有能耗低、速度高、保养维修简便、精度高等优点,受国内企业的高度关注。

2024-05-22 07:49:07
2024-05-22 07:45:25
2024-05-22 07:39:42
版权所有 © 上海浦雄实业有限公司 ProPureX™ | 沪ICP备23562356号